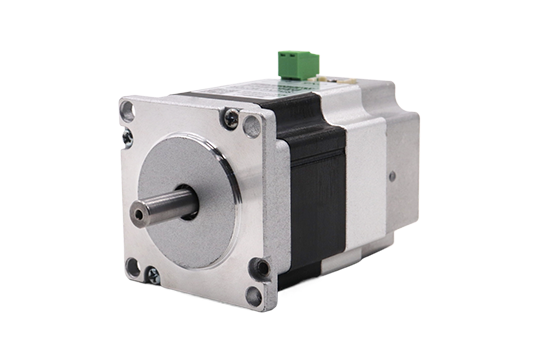
上海四宏電機(jī)有限公司主營(yíng)產(chǎn)品:低壓伺服電機(jī)、交流伺服電機(jī)、步進(jìn)電機(jī)、無刷電機(jī)以及配套驅(qū)動(dòng)器。
南方大區(qū):13482896782
北方大區(qū):18017377875
廣東大區(qū):13061929082
北方大區(qū):18017377875
廣東大區(qū):13061929082