上海四宏電機(jī)有限公司主營產(chǎn)品:低壓伺服電機(jī)、交流伺服電機(jī)、步進(jìn)電機(jī)、無刷電機(jī)以及配套驅(qū)動(dòng)器。
南方大區(qū):13482896782
北方大區(qū):18017377875
廣東大區(qū):13061929082
北方大區(qū):18017377875
廣東大區(qū):13061929082
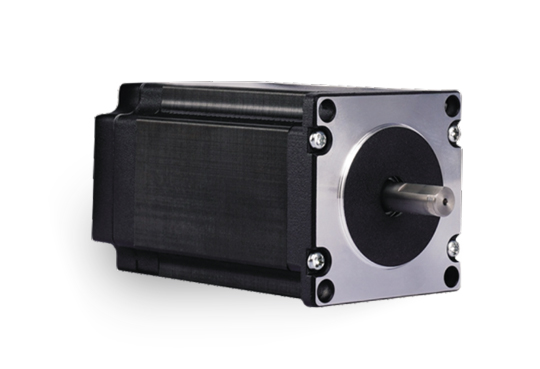
步進(jìn)電機(jī)在何種情況下使用?
步進(jìn)電機(jī)是一種作為控制用的特種電機(jī),它的旋轉(zhuǎn)是以固定的角度(稱為步距角)一步一步運(yùn)行的,其特點(diǎn)是沒有積累誤差,所以廣泛應(yīng)用于各種開環(huán)控制。步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)電機(jī)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(即步距角)。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)您可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。因此在需要準(zhǔn)確定位或調(diào)速控制時(shí)均可考慮使用步進(jìn)電機(jī)。
為什么步進(jìn)電機(jī)的力矩會(huì)隨轉(zhuǎn)速升高而下降?
步進(jìn)電機(jī)轉(zhuǎn)動(dòng)時(shí),電機(jī)各相繞組的電感將形成一個(gè)反向電動(dòng)勢(shì);頻率越高,反向電動(dòng)勢(shì)越大。在它的作用下,電機(jī)隨頻率(或速度)的增大而相電流減小,從而導(dǎo)致力矩下降。
為什么步進(jìn)電機(jī)低速進(jìn)可以正常運(yùn)轉(zhuǎn),但若高于一定速度就無法啟動(dòng)并伴有嘯叫聲?
步進(jìn)電機(jī)有一個(gè)技術(shù)參數(shù):空載啟動(dòng)頻率,即步進(jìn)電機(jī)在空載情況下能夠正常啟動(dòng)的脈沖頻率,如果脈沖頻率高于該值,電機(jī)不能正常啟動(dòng),可能發(fā)生丟步或堵轉(zhuǎn)。在有負(fù)載的情況下,啟動(dòng)頻率應(yīng)有加速過程,即啟動(dòng)頻率較低,然后按一定加速度升到所希望的高頻(電機(jī)轉(zhuǎn)速從低速升到高速)。空載啟動(dòng)頻率一般為電機(jī)運(yùn)轉(zhuǎn)一圈所需脈沖數(shù)的2倍。
如何克服兩相混合式步進(jìn)電機(jī)在低速運(yùn)轉(zhuǎn)時(shí)的振動(dòng)和噪聲?
步進(jìn)電機(jī)低速轉(zhuǎn)動(dòng)時(shí)振動(dòng)和噪聲大是其固有的缺點(diǎn),一般可采用以下方案來克服:A、如步進(jìn)電機(jī)正好工作在共振區(qū),可通過必變減速比提高步進(jìn)電機(jī)運(yùn)行速度。B、采用帶有細(xì)分功能的驅(qū)動(dòng)器,這是最常用的,最簡(jiǎn)便的方法。因?yàn)榧?xì)分型驅(qū)動(dòng)器電機(jī)的相電流變化較半步型平緩。C、換成步距角更小的步進(jìn)電機(jī),如三相或五相步進(jìn)電機(jī),或兩相細(xì)分型步進(jìn)電機(jī)。D、換成直流或交流步進(jìn)電機(jī),幾乎可以完全克服震動(dòng)和噪聲,但成本較高。E、在電機(jī)軸上加磁性阻尼器,市場(chǎng)上已有這種產(chǎn)品,但機(jī)械結(jié)構(gòu)改變較大。細(xì)分步進(jìn)電機(jī)驅(qū)動(dòng)器的細(xì)分?jǐn)?shù)是否能代表精度? 步進(jìn)電機(jī)的細(xì)分技術(shù)實(shí)質(zhì)上是一種電子阻尼技術(shù),其主要目的是減弱或消除步進(jìn)電機(jī)的低頻振動(dòng),提高電機(jī)的運(yùn)轉(zhuǎn)精度只是細(xì)分技術(shù)的一個(gè)附帶功能。比如對(duì)于步進(jìn)角為1.8度的兩相混合式步進(jìn)電機(jī),如果細(xì)分驅(qū)動(dòng)器的細(xì)分?jǐn)?shù)設(shè)置為4,那么電機(jī)的運(yùn)轉(zhuǎn)分辨率為每個(gè)脈沖0.45度,電機(jī)的精度能否達(dá)到或接近0.45度,還取決于細(xì)分驅(qū)動(dòng)器的細(xì)分電流控制精度等其它因素。不同廠家的細(xì)分驅(qū)動(dòng)器精度可能差別很大,細(xì)分?jǐn)?shù)越大精度越難控制。