上海四宏電機有限公司主營產品:低壓伺服電機、交流伺服電機、步進電機、無刷電機以及配套驅動器。
南方大區:13482896782
北方大區:18017377875
廣東大區:13061929082
北方大區:18017377875
廣東大區:13061929082
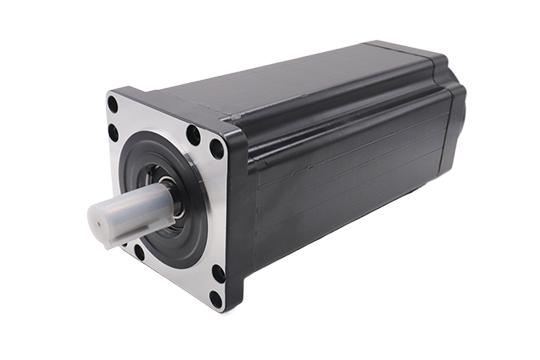
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進電機驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。
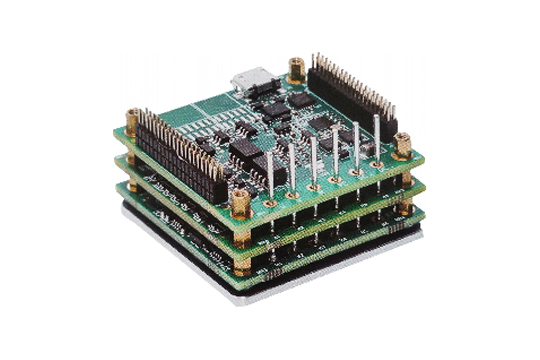
步進電機驅動器原理在電機軸上的負載慣量大小對電機的靈敏度和整個步進系統的精度將產生影響。通常,當負載小于電機轉子慣量時,上述影響不大。但當負載慣量達到甚至超過轉子慣量的5倍時,步進電機驅動器原理會使靈敏度和響應時間受到很大的影響。甚至會使步進放大器不能在正常調節范圍內工作。
步進電機驅動器原理所以對這類慣量應避免使用。推薦對步進電機慣量Jm和負載慣量Jl之間的關系如下: 1≤Jl/Jm<5負載轉矩的計算方法加到步進電機軸上的負載轉矩計算公式,因機械而異常。但不論何種機械,都應計算出折算到電機軸上的負載轉矩。步進電機驅動器原理通常,折算到步進電機軸上的負載轉矩可由下列公式計算: Tl=(FL/2πμ) T0 式中,Tl:折算到電機軸上的負載轉矩(N.M) F:軸向移動工作臺時所需要的力 L:電機軸每轉的機械位移量(M) To:滾珠絲杠螺母,軸承部分摩擦轉矩折算到步進電機軸上的值(N.M) μ:驅動系統的效率 圖1 工作臺進給示意圖F取決于工作臺的重量,摩擦系數,水平或垂直方向的切削力,是否使用了平衡塊(用在垂直軸)。
步進電機驅動器原理如果是水平方向,F軸的值由上圖例給出。 無切削時: F=μ(W fg),切削時: F=Fc μ(W fg Fcf) 式中,W:滑塊的重量(工作臺與工件)Kg μ:摩擦系數 Fc:切削力的反作用力 fg:用鑲條固緊力 Fcf:由于切削力靠在滑塊表面作用在工作臺上的力(kg)即工作臺壓向導軌的正向壓力。
計算轉矩時下列幾點應特別注意。步進電機驅動器原理由于鑲條產生的摩擦轉矩必須充分地考慮。
步進電機驅動器原理通常,僅僅從滑塊的重量和摩擦系數來計算的轉矩很小的。請特別注意由于鑲條加緊以及滑塊表面的精度誤差所產生的力矩。