上海四宏電機有限公司主營產品:低壓伺服電機、交流伺服電機、步進電機、無刷電機以及配套驅動器。
南方大區:13482896782
北方大區:18017377875
廣東大區:13061929082
北方大區:18017377875
廣東大區:13061929082
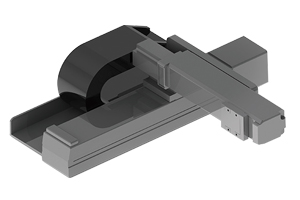
上海四宏步進電機在基于圖像處理評價函數的調焦系統中,常用的調焦策略包括斐波那契搜索法和爬山搜索法,其中又以爬山搜索法應用最為廣泛。根據爬山搜索的原理,在開始搜索時,先復位調焦鏡頭到起始搜索位置,在搜索焦點的過程中,要防止由于圖像噪聲等干擾造成程序判斷錯誤,導致調焦鏡頭越出調焦范圍邊界。
為了適應這種控制需求,對通用步進電機控制器進行了改進,使其在具有自動和手動控制功能的同時,引入限位信號反饋控制。電機控制器使用硬件描述語言(HDL)編寫,而限位信號則由位置感應電路中的光電開關器件自動反饋。
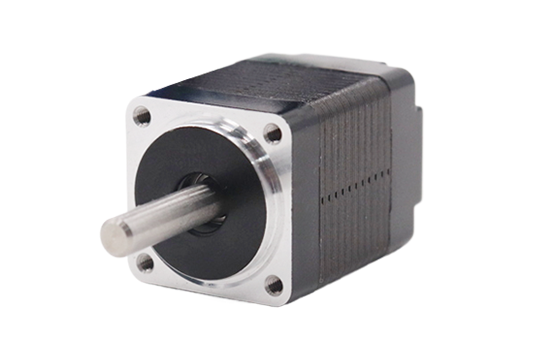
上海四宏步進電機就是一種將電脈沖轉換為角位移或直線運動的執行設備。在非超載的情況下,電機轉速和停止位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,因此步進電機廣泛應用于精密控制場合。